
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Пневматические приборы низкого давления изменения сопротивления в соответствующем звене запаздывания в обратной связи. Хотя непрерывное управление проходным сечением соответствующих дросселей принципиально возможно, однако оно сопряжено со значительными трудностями, так как в этом случае обязательным условием является применение ламинарных 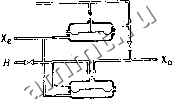 Фиг. 4.7. Схема для выполнения операции возведения в степень с помощью множительного устройства. 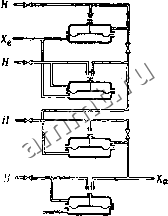 сможет непрерывно изменяться при помощи Фиг. 4.8. Схема для выполнения операции возведения в степень с непрерывным управлением коэффициентом с при применении двух множительных устройств. дросселей. В большинстве случаев грубую установку можно как и прежде производить путем изменения сопротивления в цепочке дроссель - емкость, а непрерывное управление осуществлять путем изменения коэффн- циента передачи при помощи множительного устройства. С помощью этого надежного метода можно также управлять временем предварения Т, и временем изодрома Тп в известных пределах, как и коэффициентом усиления Vr пропорционально действующего передаточного звена. На фиг. 4.9 показана вычислительная схема для непрерывного управления временем предварения Г, передаточного звена с предварением, а на фиг. 4.10 - схема Фиг. 4.9. Вычислительная схема для непрерывного управления временем предварения звена предварения. el- Ха = сХе, с мотет непрерывно. изменяться при помощи 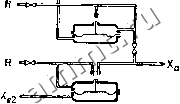 управления временем изодрома для интегрального регулятора. Для регулятора с пропорциональной составляющей достаточно, чтобы пропорциональная составляющая непрерывно управлялась, так как эффективность Д- и И-составляющих зависит от П-состав-ляющей. Приведенные относительно простые примеры практического применения множительных устройств показывают, насколько важны такие вычислительные звенья. Без сомнения, их можно отнести к группе важнейших устройств, которые позволяют обеспечить еще более Глава iV высокую ступень техники автоматического регулирования- контроль одного регулятора другим. В настоящее время еще невозможно дать полный обзор множительных устройств, так как они относятся к столь новой области, где теоретические и практические исследования пока еще только начинаются. 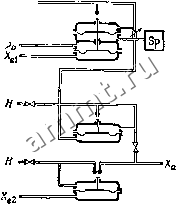 с может непрерывно изменяться при помощи Фиг. 4.10. Вычислительная схема для иепрерыв-ного управления временем изодрома интегрирующего передаточного звена. 1. Устранение при помойки нелинейностей влияния структурных изменений в ступенчато протекающих процессах Ступенчато протекающий процесс загрузки принципиально отличается от непрерывного, в котором изменения структуры объекта во время процесса наступают только в исключительных случаях. Это можно особенно легко пояснить на примере регулирования давления в реакторе, где должна испаряться вода, растворивщая реагирующую жидкость. Регулятор температуры, работу которого мы не будем рассматривать, обеспечивает постоянство температуры за счет впуска горячего пара. Регулятор давления управляет выпускным клапаном, через который выходит образующийся во время процесса водяной пар. В начале процесса выпаривания из-за Caмoнdcfplluвaющuёcя системы высокого содержания воды в выходном продукте образуется много водяного пара, и регулирующий вентиль давления должен быть соответственно щироко открыт. Давление в сосуде остается постоянным, если получение пара и его выпуск равны. Таким образом, положение выпускного клапана пара является мерилом получен ного количества пара. Чем больше образуется пара, тем меньше сказываются незначительные изменения на выпускном вентиле. После того как испарилось большое количество воды, чтобы поддержать определенное давление в реакторе, выпускной вентиль должен почти полностью закрыться, так как давление снизится еще сильнее, если выпускной вентиль откроется на условную единицу. Поскольку коэффициент усиления регулируемого объекта равен изменению давления при изменении положения клапана на единицу, то коэффициент усиления объекта по мере продолжения выпаривания возрастет, а устойчивость регулирования снизится. Пусть при закрытии клапана на 50% давление меняется на 1% при изменении положения на 0,5 %, тогда будет Ve = 0,5/1 = 0,5. После этого выпаривание уменьшилось в 2 раза, клапан открыт на 25% и теперь следует ожидать, что при изменении положения клапана на 1 % давление снизится также на 1%. Следовательно, коэффициент усиления увеличился вдвое, т. е. от 0,5 до 1. Нужно учесть, что коэффициент усиления увеличился в 2 раза при условии, что проходное сечение клапана вдвое уменьшилось. Отсюда следует, что устойчивость регулирования со временем уменьшается по мере уменьшения испарения. Следовательно, существует только одна оптимальная настройка регулятора для вполне определенного случая или для вполне определенного момента времени. Если, например, регулятор настроен таким образом, что при открытии клапана на 50% происходит среднее испарение, то при открытии клапана на 25% уже наступает граница устойчивости, и, если степень открытия станет меньше, регулирование будет неустойчивым. Если настроить регулятор таким образом, что при проходном сечении, открытом на 25%, он отслеживает средние колебания при выпаривании, то граница устой- ЧИВ0СТИ будет достигнута при открытии клапана на ,12,5%. Это, Ьднако, справедливо для случая, когда клапан йМеет прямолинейную характеристику. Затруднения Можно преодолеть, сделав проходное сечение клапана Зависимым от хода вентиля. Но это требует сложных специальных разработок исполнительных механизмов. Если желательно использовать стандартные клапаны, то нужный эффект можно получить и в вычислительном устройстве регулятора. В этом случае нужно включить передаточное звено, которое оказывало бы обратное влияние на коэффициент передачи, например, клапана с, линейной характеристикой, с тем чтобы произведение обоих передаточных коэффициентов составляло 1. .Обозначим передаточный коэффициент клапана V тогда, при условии, что клапан открыт на 100%, получим следующие значения (см. табл. 2). В качестве компенсационной схемы предлагается схема, показанная на фиг. 4.11. При давлении питания Фиг. 4:11. Вычислительная схема для выравнивания передаточного коэффициента регулятора по передаточному коэффициенту объекта. Я = 100 мм вод. ст. передаточный коэффициент компенсационного звена будет =/100. Отсюда мы получим значения, приведенные в табл. 3.  Таблица 2 Таблица 3
Можно заметить, что теперь передаточный коэффициент обоих звеньев, а именно клапана и компенсационного звена, будет равен V=Vsf,VR 1.Тем самым достигается линейность, так что больших трудностей с обеспечением устойчивости встретиться не должно. Хотя вредное влияние структурных изменений в объекте теоретически очень просто устранить, на практике могут возникнуть трудности, связанные во многих случаях с дополнительными, не поддающимися математическому описанию нелинейностями. Небольшая нелинейность, которую не Удалось устранить, в большинстве случаев не вредна. В нашем случае это именно так, поскольку мы не стремимся к оптимальному регулированию. Поэтому зачастую для устранения нелинейностей достаточно применения операций возведения в степень и извлечения корня. Если нет математического описания нелинейности или требуемые вычислительные операции связаны с использованием большого количества приборов, нужно применять функциональный преобразователь, передаточная характеристика которого настраивается от руки без предварительных расчетов. Делается ли эта настройка в разомкнутой цепи или после замыкания контура регулирования, ее можно сделать зависящей от нужных начальных условий. На фиг. 4.12 показан пневматический функциональный преобразователь. Однако этот преобразователь не следует рассматривать как универсальное средство против любой нелинейности, ибо допустимая кривизна кривой должна находиться в определенных пределах. В особо сложных случаях можно дополнительно к функциональному преобразователю включить вычислительное устройство с нелинейной передаточной характеристикой, за счет которого достигается грубая компенсация нелинейности. Затем следует окончательная точная подгонка при помощи функционального преобразователя. В большинстве случаев достаточно осуществлять учет нелинейных передаточных коэффициентов при помощи соответствующих вычислительных схем. Поэтому на фиг. 4.13 показаны вычислительные схемы с нелинейными передаточными коэффициентами. Естественно,
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |