
(926)274-88-54
Бесплатная доставка.
Бесплатная сборка.
График работы:
Ежедневно. С 8-00 до 20-00.
Почта: soft_hous@mail.ru
|
|
Звоните! (926)274-88-54 Бесплатная доставка. Бесплатная сборка. |
Ассортимент тканей График работы: Ежедневно. С 8-00 до 20-00. Почта: soft_hous@mail.ru |
|
Читальный зал --> Частичная автоматизация компрессора щающегося кулачка определенного профиля, графика, изображенного на бумаге или пленке, и т. д. Следящий регулятор получает задание, изменяющееся во времени по неизвестной заранее программе. К следящим регуляторам относятся, например, электронные мосты и потенциометры. В них положение стрелки, как в любом измерительном приборе, должно соответствовать измеряемой величине; последняя является заданным значением и может произвольно изменяться. Механизм, перемещающий стрелку, должен с минимальной погрешностью отрабатывать все изменения задающей (измеряемой) величины. Оптимальные регуляторы имеют задающие устройства, содержащие кибернетические элементы. С помощью запрограммированных математических зависимостей, вводимых в задающее устройство, или путем последовательных проб определяется такое задание регулятору, которое при данных реальных условиях обеспечивает оптимальное ведение процесса (по производительности, стоимости, к. п. д. или. другим показателям). Наиболее распространенными регуляторами, применяемыми в холодильникой технике, являются стабилизирующие. Программные и следящие регуляторы в холодильных установках не применяют. Перспективным видом регуляторов являются оптимальные, которые можно применять, например, для определения необходимой холодопроизводительности компрессоров, работающих; на испарительную систему. Система с такими регуляторами применена на холодильнике в г. Витри-на-Сене (Франция) [11]. В зависимости от источника энергии, приводящего в движение регулирующий орган, различают регуляторы прямого и непрямого действия. В регуляторе прямого действия усилителя нет и регулирующий орган перемещается чувствительным элементом. В регуляторах непрямого действия для привода регулирующего органа используется вспомогательная энергия, подводимая извне. В зависимости от вида вспомогательной энергии регуляторы бывают электрические, пневматические, гидравлические и комбинированные. Кроме того, применяются регуляторы непрямого действия без подвода вспомогательной энергии извне. Они состоят из небольшого управляющего прибора прямого действия и специального исполнительного механизма, для привода которого используется давление рабочей среды до регулирующего органа. Клапан первичного регулятора выполняет* роль усилителя и управляет работой основного регулирующего-органа. Таким образом, хотя регулятор снабжен усилителем, энергия извне к нему не подводится. Одной из наиболее существенных характеристик системы регулирования является способ воздействия на объект. в зависимости от способа воздействия на объекты регуляторы могут быть пла(вного и позиционного действия. В регуляторах плавного действия величина х может принимать любые значения в пределах между максимальным и минимальным. Так, например, регулирующий клапан, приводимый в движение электрическим двигателем или пневматическим механизмом, может плавно изменять расход жидкости нли пара. В регуляторах позиционного действия величина X может иметь два или несколько значений. Например, соле-.ноидный вентиль не может занимать промежуточных положений, а может быть только открыт или закрыт. Следует иметь в виду, что позиционные регуляторы, как правило, более просты по устройству, чем плавные. В зависимости от связи между элементами системы могут быть непрерывными и импульсными. Системы, в которых связь между элементами постоянна, т. е. каждый из элементов жестко присоединен к соседним, называются непрерывными (см. рис. 2). Системы, в,которых связь между двумя любыми элементами ие остается постоянной, а периодически размыкается, называют импульсными (прерывистыми). К таким устройствам относятся многоточечные регуляторы, например машина АМУР. В этих устройствах один усилитель обслуживает ряд регулирующих цепей, к которым он поочередно подключается. Каждая из цепей регулирования периодически на короткий промежуток времени замыкается, а остальную часть периода остается разомк-лутой. Данная классификация автоматических регуляторов может быть распространена на сигнальные и защитные устройства Большинство из них является электрическими приборами, т. е, относятся к устройствам непрямого действия. По характеру воз действия сигнальные и защитные приборы являются позицион выми. Сигнальные устройства могут быть непрерывными или им пульсными, защитные - только непрерывными. По характеру связи между отклонением и регулирующим воз- действием (иногда эту связь называют законом регулирования) регуляторы делят на статические и астатические. Статический, или пропорциональный, регулятор (П-регулятор) характеризуется зависимостью x = k6 . (1) dx , d6 = k- dx dx Из соотношения (1) видно, что величина воздействия регулятора на объект пропорциональна отклонению. Регулирующий орган останавливается, когда прекращается изменение регулируемой величины, т. е.. = О при = 0. dx dx Отсюда видно, что регулятор йрекращает воздействовать на объект независимо от того, устранено отклонение или нет. На рис. 3, а работа статического регулятора показана на примере регулятора давления после себя . Изменение нагрузки влияет на величину давления р. В результате мембрана, поднимая или опуская клапан (в зависимости от знака отклонения), сжимает или растягивает пружину. Поэтому клапан прекращает движение не тогда, когда устранено отклонение, а когда сила, развиваемая мембраной, уравновешивается силой сжатия пружины. На рис. 3, б показаны характерные случаи переходного процесса в статическом регуляторе. Если изменяется нагрузка {на- 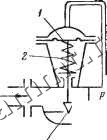 и 1 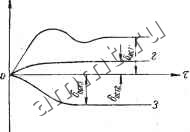 J е Ь Рис. 3. Статический регулятор давления: а - схема: / - мембрана; 2 - пружина; 3 - клапан; б - переходный процесс. пример, скачкообразно), то отклонение будет также изменяться, при этом в зависимости от свойств объекта и регулятора процесс может быть апериодическим (кривые 2 и 5) или затухающим колебательным (кривая /). Величина остаточного отклонения боот зависит от чувствительности регулятора, или его коэффициента усиления k. С его увеличением остаточное отклонение уменьшается, точность поддержания заданного значения повышается. В рассмотренной схеме регулятора значение коэффициента k может возрастать с увеличением площади мембраны или уменьшением жесткости пружины. Астатический, или .интегрирующий, peyля-тор (И-регулятор) характеризуется зависимостью
ООО «Мягкий Дом» - это Отечественный производитель мебели. Наша профильная продукция - это диваны еврокнижка. Каждый диван можем изготовить в соответствии с Вашими пожеланияи (размер, ткань и материал). Осуществляем бесплатную доставку и сборку. Звоните! Ежедневно! (926)274-88-54 Продажа и изготовление мебели. Копирование контента сайта запрещено. Авторские права защищаются адвокатской коллегией г. Москвы. |